AI
Paper Review [UniAD]
Planning-oriented Autonomous Driving
2024-09-01 15:40
Paper Review
Writer: SungwookLE
DATE: ‘24.9/1
UniAD:Planning-oriented Autonomous Driving
1. Abstract
- 모듈러 방식으로 구성된 자율주행 SW는 모듈을 통과할 때마다의 출력 오차가 누적되는 현상으로 인해, 많은 문제를 겪고 있음
- 자율주행에서 인지/예측 등의 모듈들은 planning을 위해 필요한 것이므로,
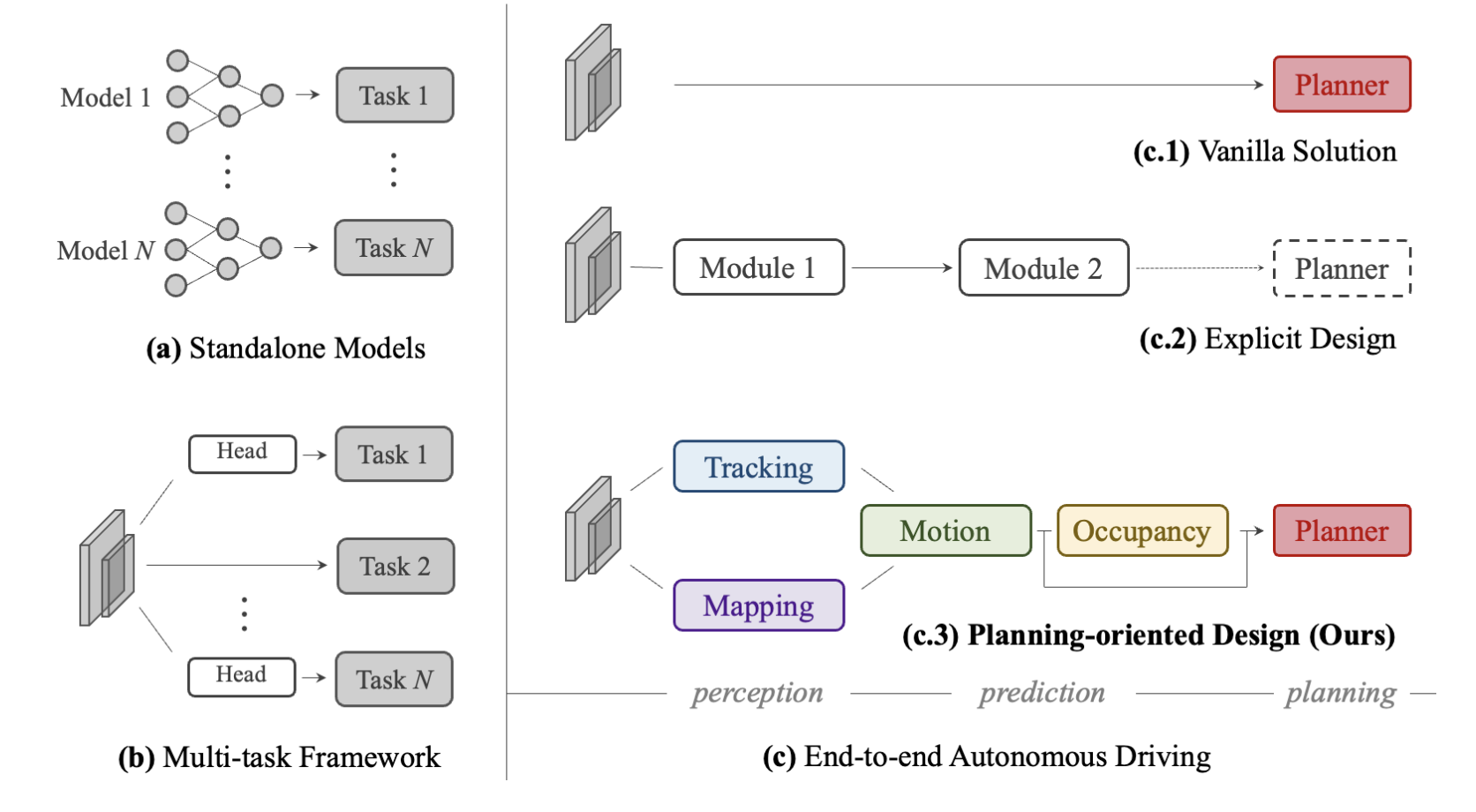
Unified Autonomous Driving(UniAD)라는 풀스택 네트워크를 제안한다.- Prediction and planning as a whole
- Planning-oriented
- End-To-End 네트워크에서도 구조화를 통해 모듈화를 달성할 수 있고, 효과적이다. (
c-3)
2. Methodology
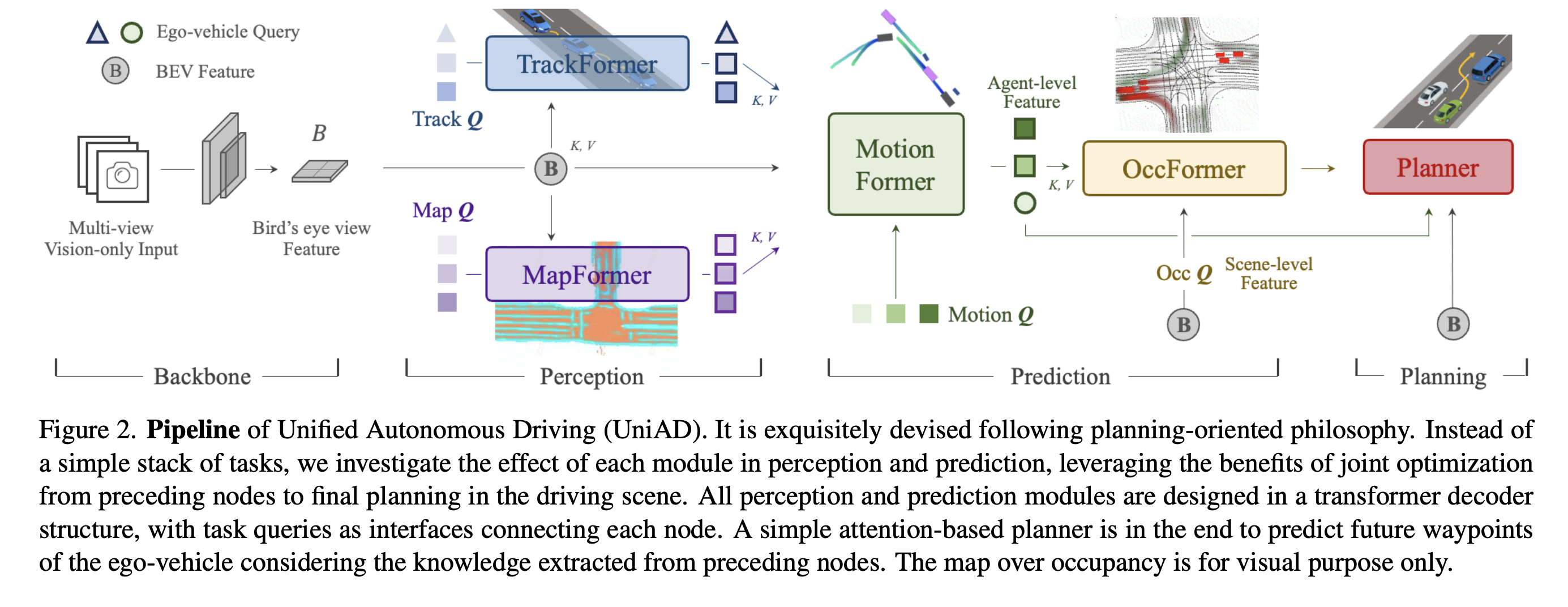
- UniAD는 트랜스포머 디코더로 구성되어 있음(Perception, Prediction, Planner)
TrackFormer, MapFormer, MotionFormer, Planner- Perception: Tracking and Mapping
- TrackFormer: 트랙 정보 (detect)
- Detection과 Multi-Object Tracking을 수행하는 역할임
- BEV(Bird-eye view) feature 정보를 입력으로 받음
- MapFormer: Semantic 도로 정보
- Panoptic SegFormer
- Prediction: Motion Forecasting
- Panoptic SegFormer
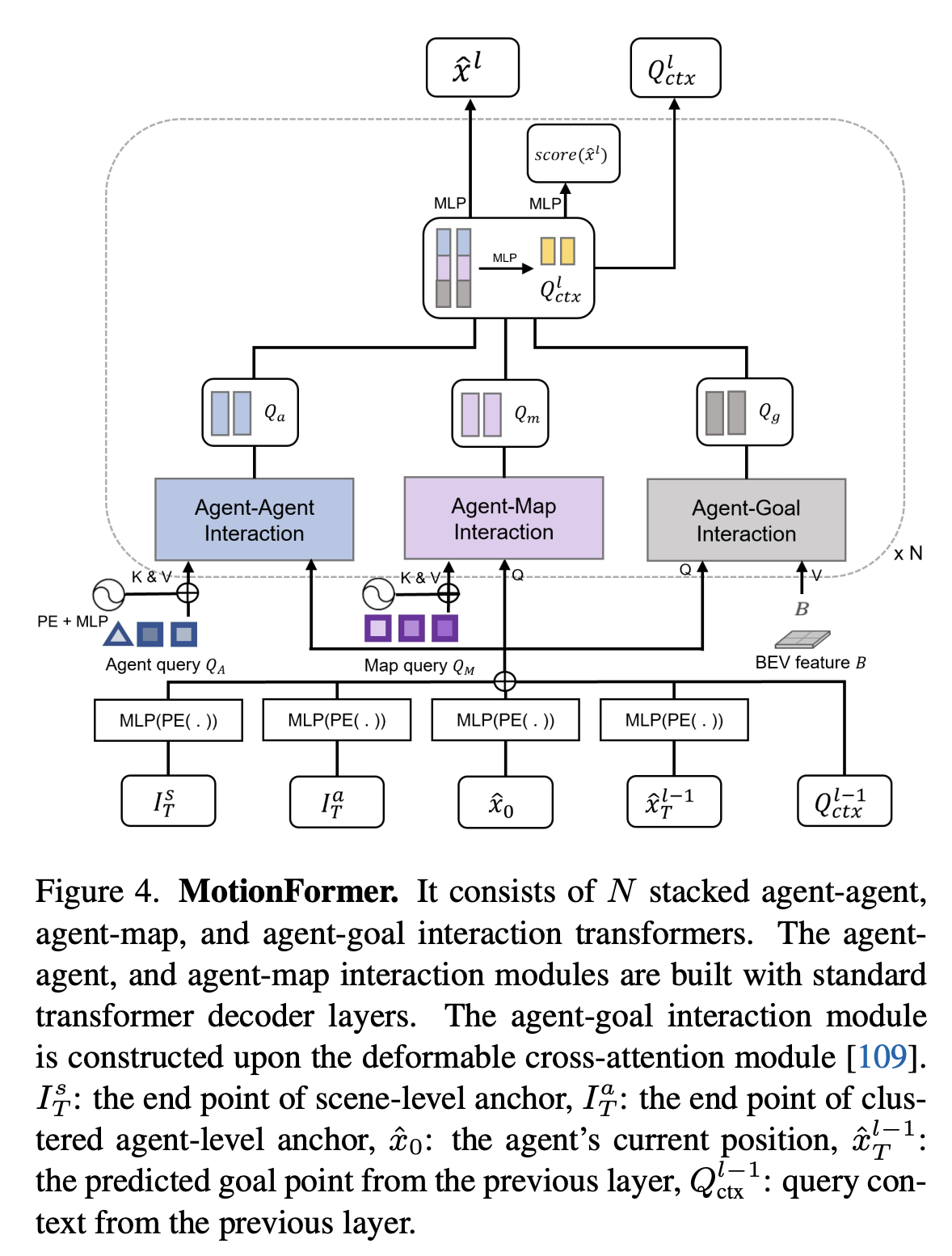
- MotionFormer: agent의 미래 경로를 예측
- agent-agent, agent-map, agent-goal point 정보를 입력으로 받음
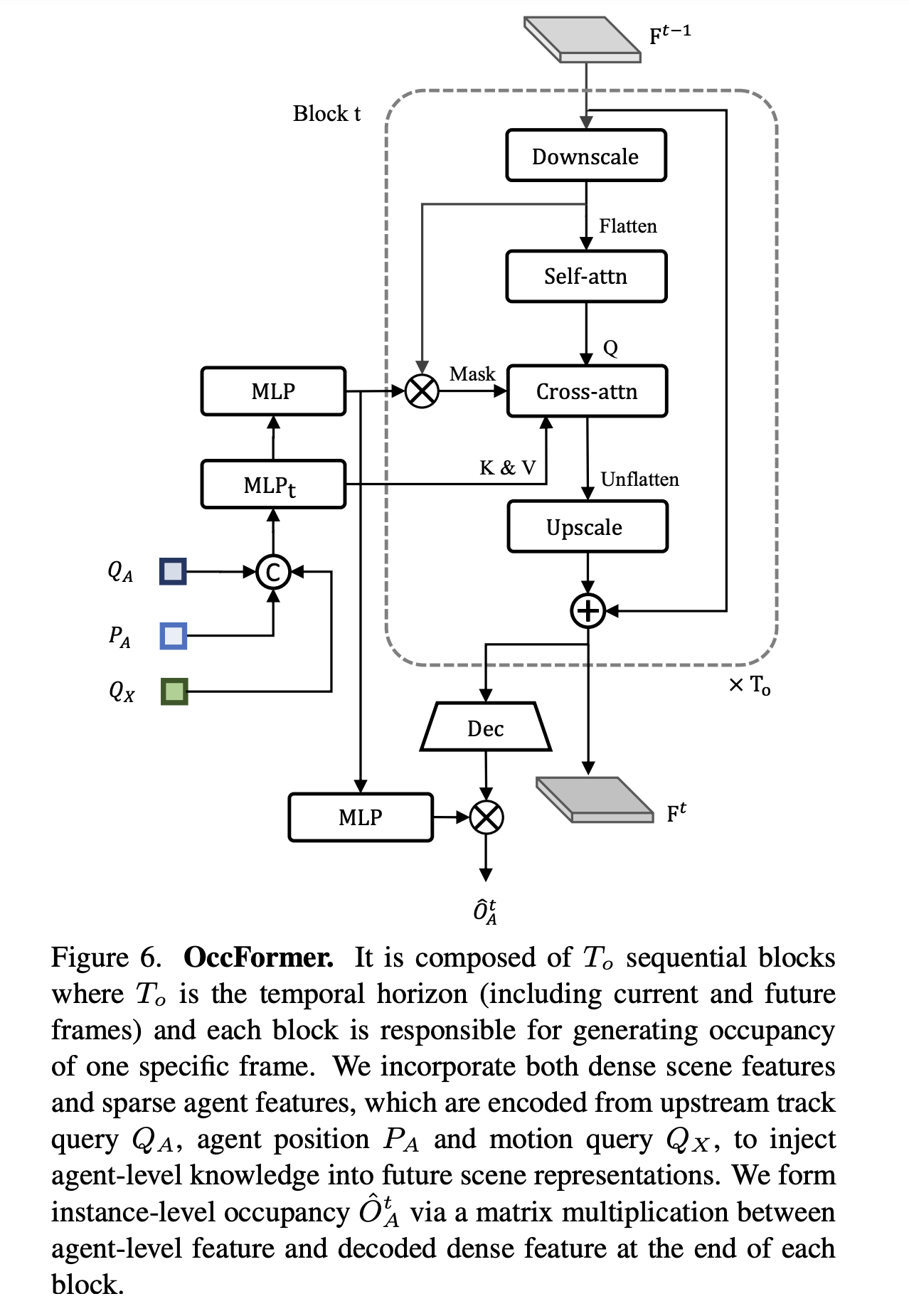
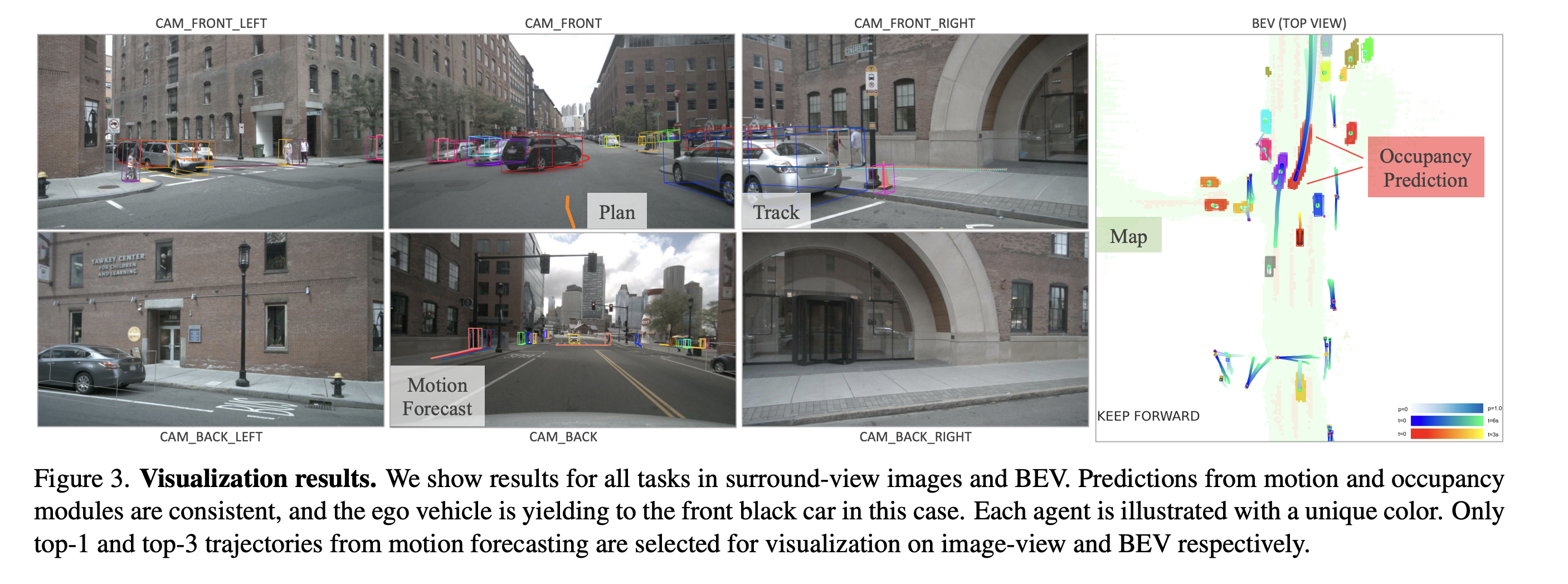
- OccFormer: occupancy 맵 상의 정보를 (Occupancy Prediction)
- pixel-agent interaction, instance-level occupancy
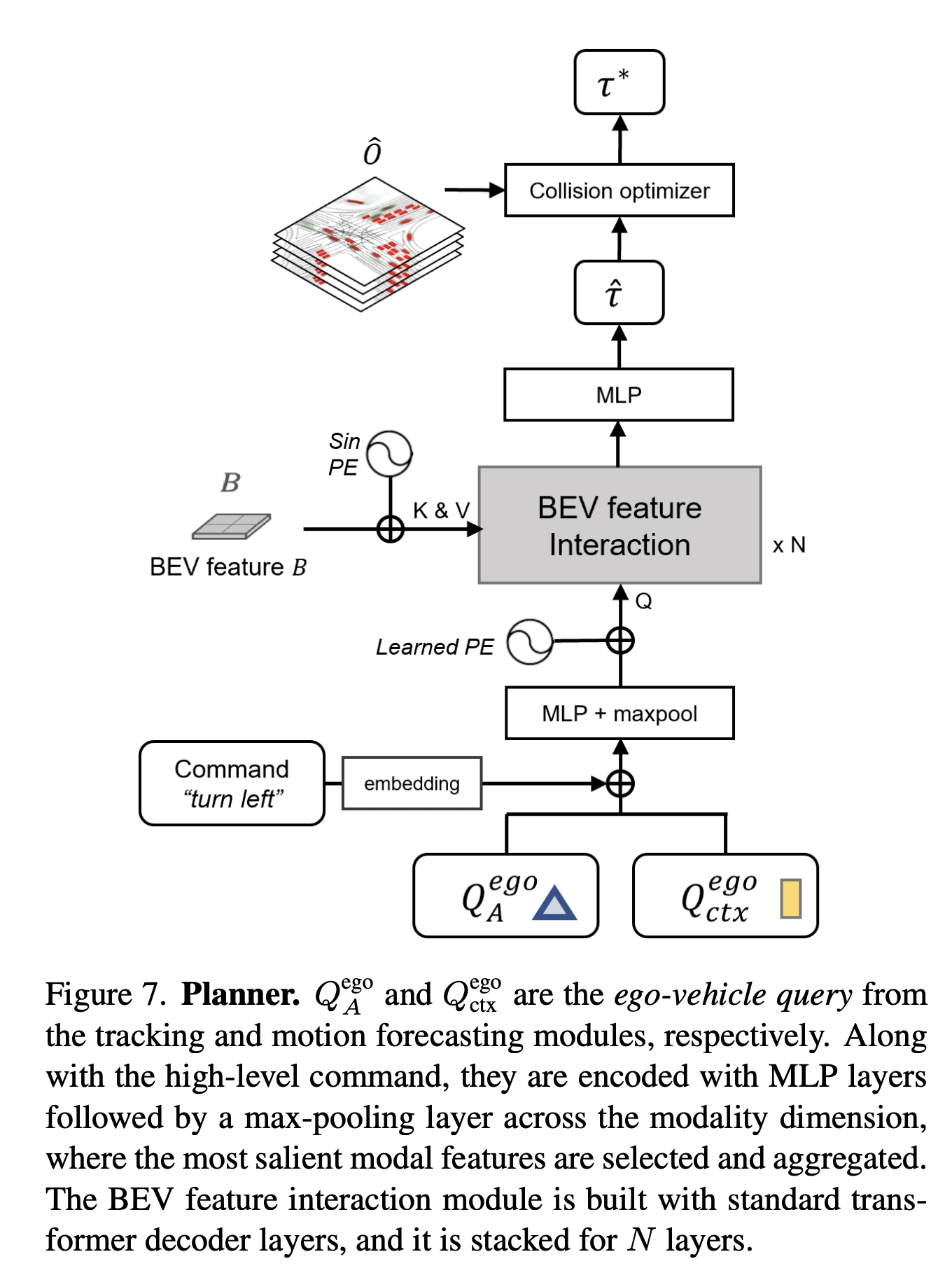
- Planning
- Planner: 플래닝 결과를 출력 (without HD maps)
- Learning
- 2개의 stage로 나뉨: Perception parts를 학습 시킨 다음에, End-To-End 전체 모델을 학습시킴
3. Experiments
- 결과는 우수하였음 (기존 제시된 E2E 모델 대비,)
4. Conclusion
- Planning oriented pipeline을 제시하였음
- 통합시킴으로써, 얻는 이점이 있음 (원하는건 결국 planning 결과이니까)
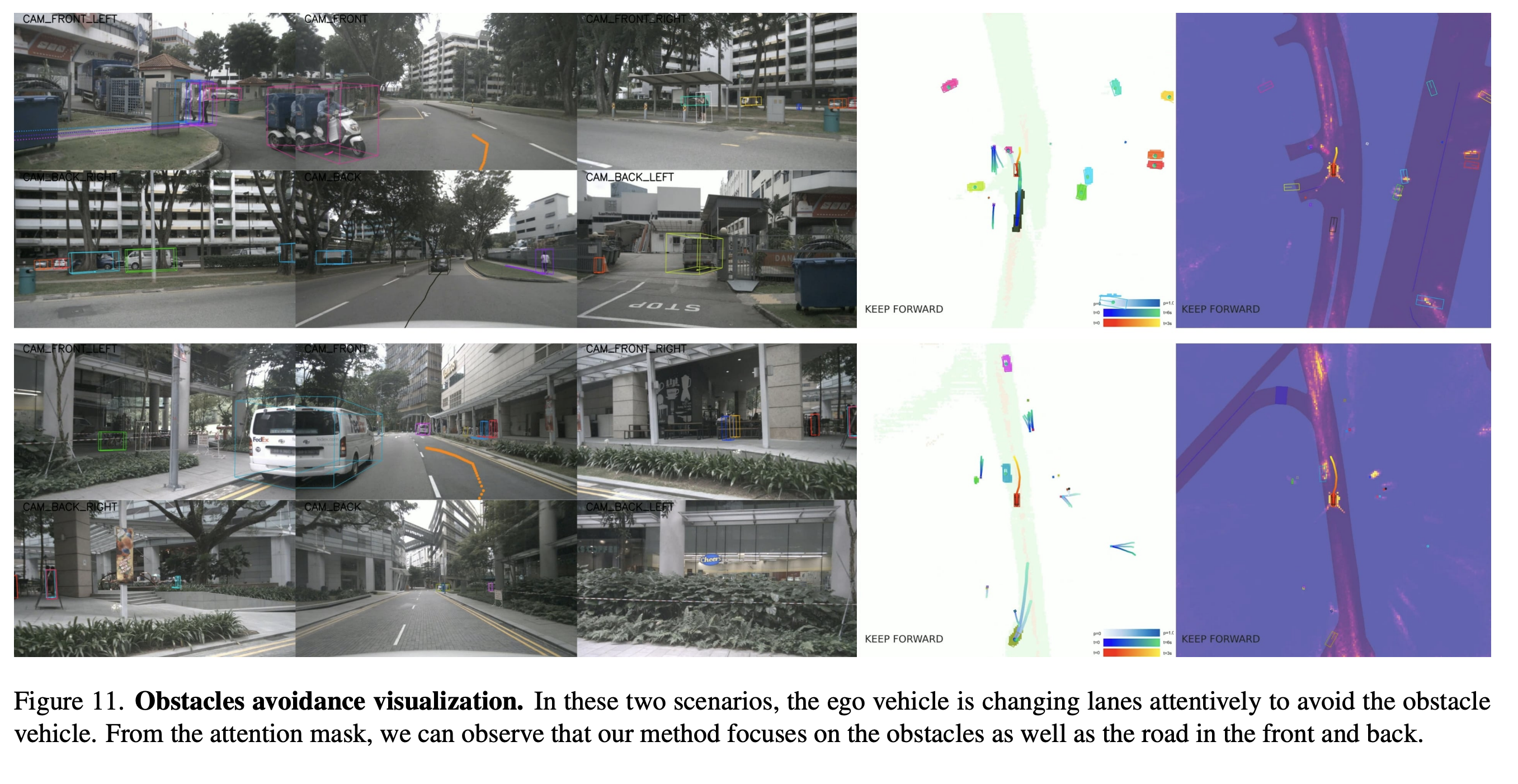
- 장애물 회피 주행
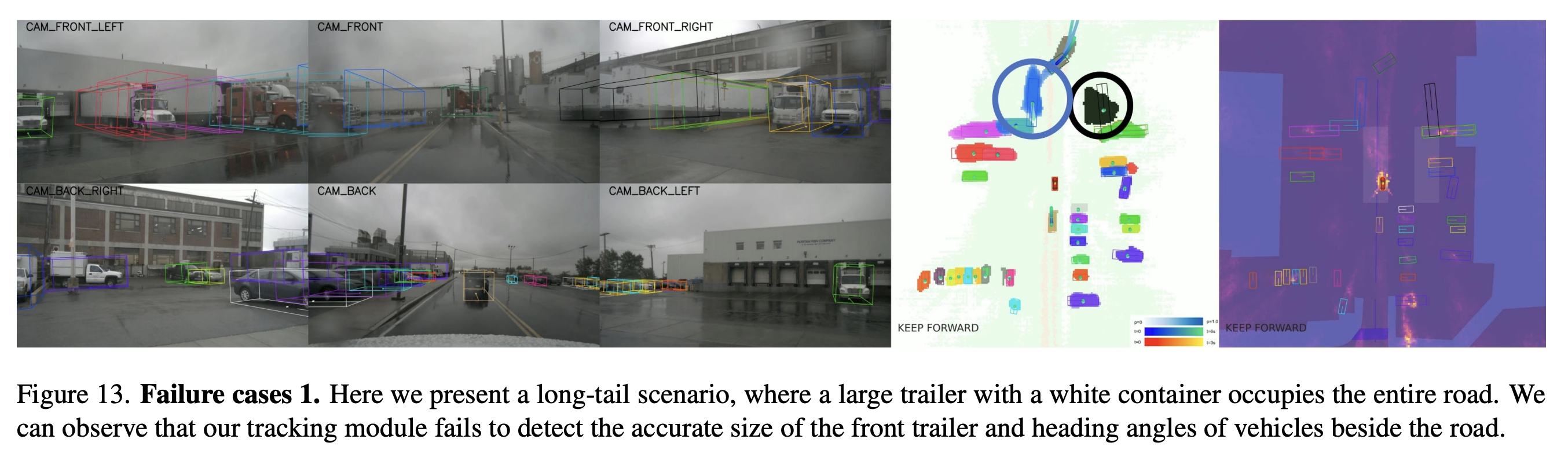
- 개선이 필요한 부분
- 객체 인식이 잘되지 않았고, 그로 인해 플래닝이 잘되지 못함
끝

sungwook
Mr