AI
Vectorized Scene Representation for Efficient Autonomous Driving
VAD as E2E
2024-08-03 14:30
Paper Review: Vectorized Scene Representation for Efficient Autonomous Driving
- 23년 8월에 SOTA 성능을 보여준 E2E Planning 논문임**
- VAD v2가 출판되었음
- VADv2: End-to-End Vectorized Autonomous Driving via Probabilistic Planning [2024 arXiv]
Abstraction
- 자율주행차량의 경로 계획을 위해선 주변 환경에 대해 comprehensive understanding이 필요함
-
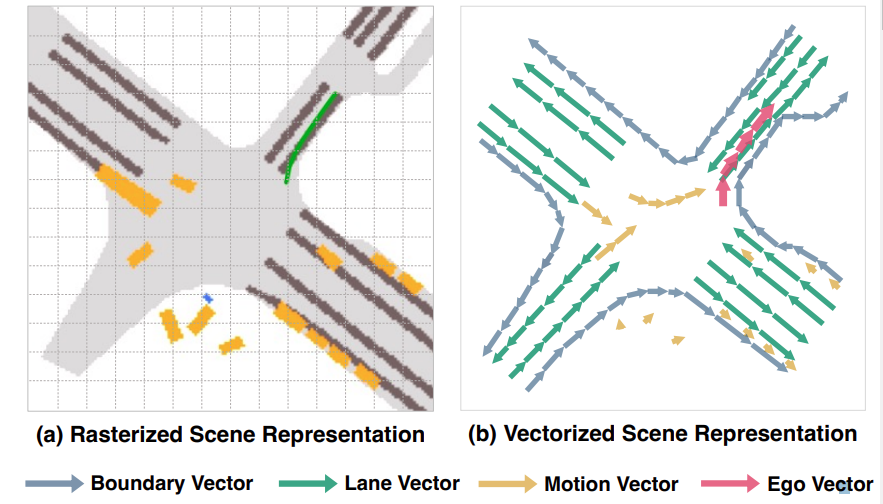
이를 위해선 Raseterized Scene이 아닌 Vectorized Scene이 필요하다.
- 본 논문은 end-to-end fully Vectorized 패러다임을 제시함
- Agent의 움직임과 맵 정보를 vectorized 해서, 경로 계획에 더 효과적임
- 더 빠르다. better than sparsed rasterized information
1. Introduction
- Traditional autonomous driving 은 모듈러 패러다임으로 설계되었다.
- 즉, 인지, 예측, 판단, 계획 모듈 들로 이루어져 있었다.
- 이러한 모듈로 인해 플래닝 모듈은 cannot access the original sensor data (풍부한 의미적 정보를 담고 있는)
- 플래닝은, 모든 처리가 완료된 정보만을 수신함으로써, 인지 오차 등이 경로 계획에 큰 에러를 발생시켰다. (안전 측면에서 안좋음)
- 최근의 End-to-End 접근은 센서의 로우 데이터를 입력받아 플래닝을 출력하는 통합 디자인 되는 방식으로 진행되었고, 어떤 연구는 학습 방식이 아닌 방법으로 접근되기도 하였으나, 최적화가 매우 어려운 한계가 있다. (학습된 무언가가 필요해)
- 대부분의 End-to-End AI 접근은 rasterized scene을 이용해서 플래닝을 수행하였다.
- 그러나, 이러한 방식은 메모리측면에서 비효과적이고, 또, 몇몇 중요한 데이터 (예를들면 장애물) 같은 정보 표현에 있어 해상도 문제등으로 누락되는 큰 문제가 있다.
- vectorized 방식(본 논문에서 제시하는)이 더 우수하다
- 교통 흐름, 주행방향(일방통행 등) 까지도 수월하게 표현이 가능해서, 경로 계획을 수행할 때 공간 탐색에 더 유용한 정보를 제공한다.
- 연산도 효율적이고..,
- 이를 위해, SW 적으로는 map queries 와 agent queries 를 이용해서 현재 필요한 정보는 interaction 한다.
- 또, VAD(본 논문에서 제시하는 모델의 이름)는 3개의 instance-level planning constraints를 제시하였다.
- Ego-agent 충돌 제약조건
- Ego-boundary 제약 조건 (도로 경계)
- Ego-LaneDirection 제약 조건 (역주행)
2. Related Work
- Perception
- Bird’s-eye view (BEV) representation has become popular and has greatly contributed to the field of perception.
BEVFormer라는 모델은 카메라 only 정보만을 가지고 spartial(공간적) and temporal attention 을 제안했고, BEV feature를 효과적으로 인코딩했다.- 본 논문에서는 BEVFormer과 MapTR(hdmap 을 vectorized하는 네트워크임)을 이용해서 Perception 네트워크를 구성했다.
- Motion Prediction
- traditional 한 방식은 perception 정보를 참값으로 가정한 뒤 이를 통해 경로를 예측하는 것임
- 다른 연구에서는 네트워크를 이용한 방식이 있었는데, 이미지 기반의 네트워크라던지(BEV 이미지), 그래프네트워크가 제안되기도 하였음
- 최신의 연구는, perception와 prediction을 동시에 수행하는 (jointly) 연구가 있었음
- PIP라는 네트워크에서는 Vectorized map 정보와 Agent의 인터랙션을 반영해서 경로를 예측하였음 (SOTA)
- 본 논문에서는 PIP 의 정보를 기반으로 Prediction 정보를 생성함
- Planning
- 최근에 연구들은 perception과 prediction을 생략하고, 바로 planning 또는 제어입력을 만들어내는 연구가 수행 중임.
- 이런 컨셉은 간단해보이기는 하나, 해석불가능한 단점이있고 또, 최적화도 어렵다.
- 강화학습은 플래닝에 적합한 방식이며, 많은 연구가 시도되고 잇음.
- dense한 cost map 기반의 플래닝도 다양히 연구되고 있으며, 최소 cost 지점으로 도달하기 위한 플래닝 방식임
- 근데, 이런 방식은 hand-craft 하기도 하고, 잘 튜닝되면 성능이 좋으나, 그게 어려움 (후처리는 안하는게 좋아)
- 본 논문에서는 vectorzied로 표현된 장면을 이용해서 플래닝을 시도해보았다.
3. Method
- Overview
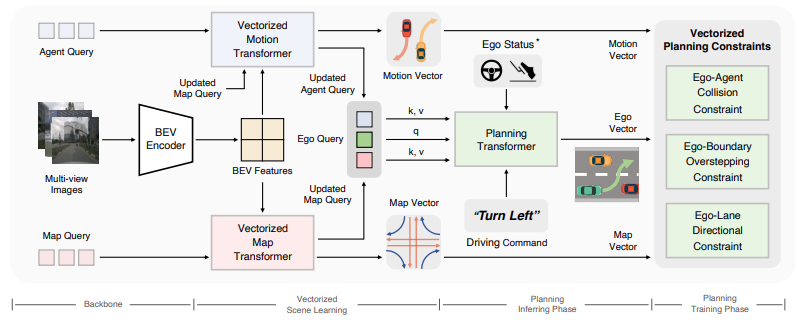
- 여러 프레임의 멀티 카메라의 이미지를 입력받고, BEV Encoding을 수행함
- agent(인식된 트랙의 센서 로우값?) 및 map 쿼리를 이용해서, 정보를 입력받은뒤 각각의 vectorized transformer를 이용해서 입력정보를 처리한다.
- VAD는 ego 쿼리라는걸 생성해서 이용하는데, ego 쿼리는 agent와 map 쿼리의 정보의 내재된 정보를 학습시키는 목적임.
- ego 쿼리, ego 상태, 드라이빙 커맨드를 기반으로, Plannig 네트워크는 경로를 생성한다.
- Vectorized Map
- VAD는 vectorized map 정보를 생성하기 위해, 일단 쿼리로 부터 map 정보를 받은 뒤에 BEV(bird-eye) 변환을 수행함.
- vector 정보로 표현했을 때, lane direction 표현에 장점을 갖는다.
- Vectorized Agent Motion
- Agent의 정보도 vectorized를 위해, 먼저 BEV를 거침
- Agent의 Motion Prediction을 더 정확하게 수행하기 위해, Agent-Agent, Agent-Map 인터렉션을 attention 메카니즘을 통해 feature를 추출하였음
- 그 다음, 예측 시간 길이의 경로를 예측한다. VAD는 타깃의 modality를 확률 스코어 정보로 출력한다.
- agent의 motion prediction 정보는 scene information에 포함되어 palnning에 사용되게 된다.
- Planning via Interaction
- vectorized scene 정보를 입력받았으면, 이제 플래닝을 할 차례
- Ego-Agent Interaction: Ego와 Agent의 인터랙션을 트랜스포머 디코더를 통해 학습함
- Ego-Map Interaction: Ego-Map 인터랙션을 트랜스포머를 통해 학습함
- Planning Head: 운전자 커맨드 (좌회전, 우회전, 직진 등)에 따른 플래닝
- vectorized scene 정보를 입력받았으면, 이제 플래닝을 할 차례
- Vectorized Planning Constraint
- Vectorzied 된 제약조건을 생성하기 위함
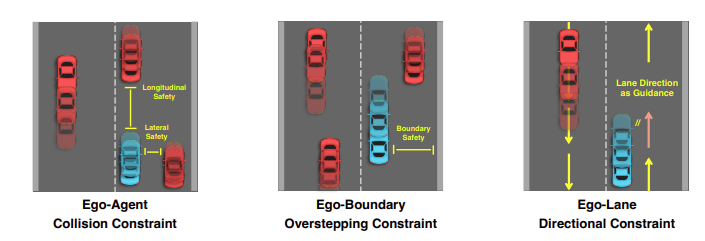
- Ego-Agent Collision Constraint
- 충돌이 발생하는 경로여선 안된다.
- 예측 정확도가 높은 motion trajectory에 대해서만 학습을 진행함.
- 종방향,횡방향 충돌이 없게끔 하는 목적함수를 디자인
- Ego-Boundary Overstepping Constraint
- 도로 바운더리에도 닿아선 안된다.
- 마찬가지로, 어느정도 confidence가 보장된 상태의 boundary만 학습을 진행함
- Ego-Lane Directional Constraint
- 방향에 대한 제약조건임
- 먼저 자차 위치를 기준으로 가장 가까운 레인 벡터(+방향)을 찾은다음.
- 그 레인벡터를 기준으로 학습을 진행함
- Vectorzied 된 제약조건을 생성하기 위함
- End-to-End Learning
- Vectorized Scene Learning Loss
- map 과 관련한 Loss ‘Lmap’
- agent의 motion prediction 과 관련된 Loss ‘Lmot’
- minFDE 정보를 가지고 Loss를 계산하였음
- Vector Contraint Loss
- Ego-Agent 충돌 관련한 Loss
Lcol - Ego-boundary 관련한 Loss
Lbd - Ego-directional 관련한 Loss
Ldir
- Ego-Agent 충돌 관련한 Loss
- Imitation Learning Loss
Limi: Planning Trajectory와 참값이 되는 Trajectoy 사이의 차이값- 참값은 충돌이 안나는 운전자(전문가)의 데이터를 참값이라고 두고,
- VAD는 end-to-end learning을 하기 위해서 위의 모든 것들은 한번에 학습한다(motion prediction 등 다 포함, ego-agent 충돌 등)
- Vectorized Scene Learning Loss
4. Experiments
- nuScene(한 데이터가 20초 정도 되는): 1.4M 3D bounding boxeds of 23 categories
- closed-loop 시뮬레이션을 위해 CARLA 시뮬레이터를 활용했고, Town5 벤치마크 시뮬레이션 진행하였음
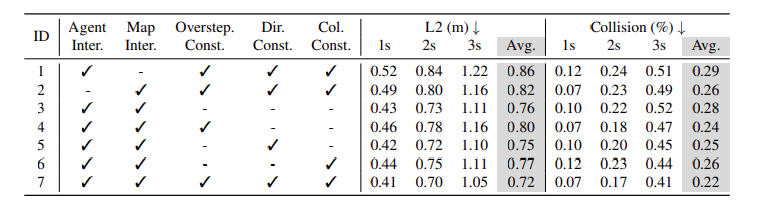
- VAD에서 제시하는 모듈들이 효과가 있었음, 다 사용했을 때 성능이 괜찮았음
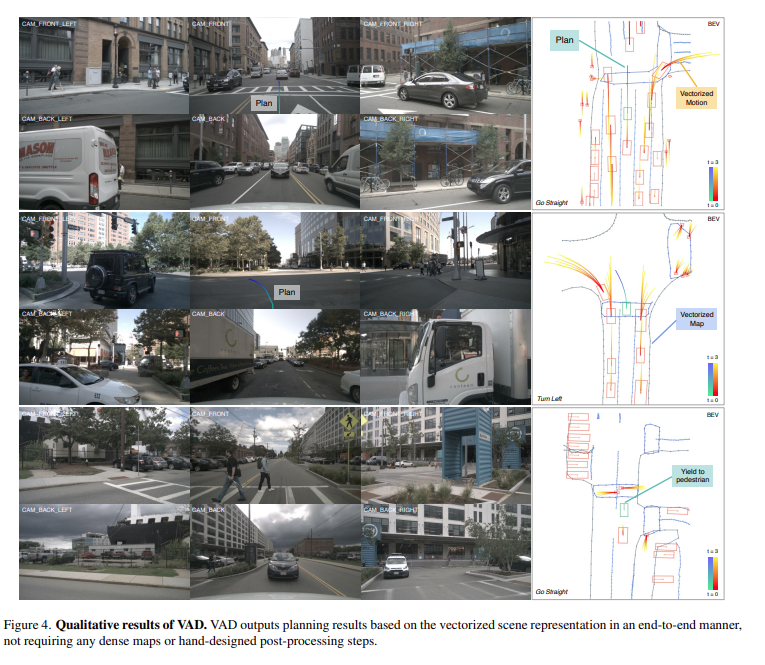
- VAD can predict multi-modality agent motions and map elements accurately, as well as plan the ego future movements reasonably according to the vectorized scene representation.
5. Conclusion
- End-to-End Planning 패러다임을 제시하였고, Vectorized Scene understanding이 효과가 있었음
- 이러한 방식은 성능 뿐 아니라, computational effective 함
- VAD는 타깃의 경로 예측도 내부에서 수행하게 되는데, 멀티 트래젝토리 중, 가장 confidence가 높은 경로에 대해서만 collision 을 고려하게 하였음
- 멀티 모달 경로에 대해서, 어떻게 활용하는게 좋을지는 추가적으로 연구를 더 해볼만함
전체 논문을 리뷰하였음
- 자율주행 모듈러 디자인의 단점은 다음 모듈은 이전 모듈의 출력값만을 참고하니, 추정 에러가 누적되는 단점을 갖고 있다.
- 즉, low level 정보를 활용하는데 제한이 있음, 자율주행 Planning에 사용하는 정보에 에러가 있을 수 밖에 없다면, 차라리 End-to-End 로 해보자.
- 다만, 이걸 AI 없이 하려고 하면 최적화가 불가능한 수준인데, AI로 한다면 본 논문에서처럼 괜찮은 성능을 보여줄 수 있다.
- 인지 뿐 아니라, agent의 경로 예측도 End-to-End 모델 안에서 한번에 수행되며, 경로 예측은 멀티 모달리티(복수 개의 경로 후보)로 출력한다. 본 논문에서는 End-to-End 시퀀스로, 복수 경로마다 가지고 잇는 confidence를 활용해서 예측 경로를 잘 활용해서 전체 모델을 학습하였음
- 기술적인 측면에서 구조는 트랜스포머 메카니즘을 이용해서 비교적 심플하게 구성된 것으로 보인다.
- 오히려, 해당 모델을 인퍼런싱 하기 위해서 map 쿼리나 agent 쿼리들을 처리하는 시퀀스가 복잡할 것 같다. 어떻게 시스템이 구성되어 있느냐(예를 들면, 어떤 정밀지도를 쓰느냐, 어떤 맵 정보를 입력 받느냐 등)에 따라, 실차 구현하려고 한다면 실전적인 어려움도 있어 보인다.
끝

sungwook
Mr