Localization- Essential with Bayes Filter
1D Localization Problem with bayes
2021-10-05 10:10
Localization Essential
AUTHOR: Sungwook LE
DATE: ‘21.10/5
1. Introduction
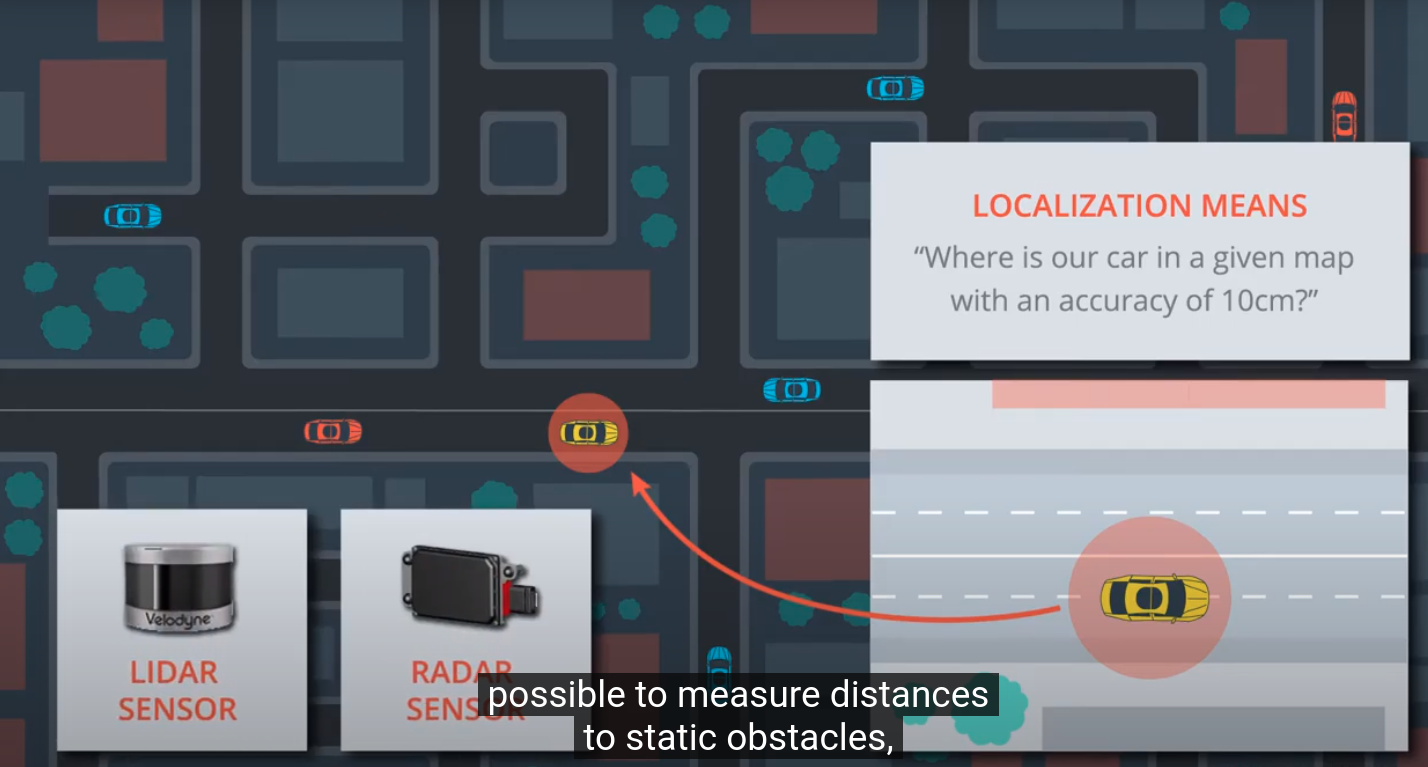
- Localization Insight: check below image..
- Localization needs informations such as
MAP, Onboard Sensor, GPS... - Filters that could be used are
Histogram Filters, Kalman Filters, Particle Filters...
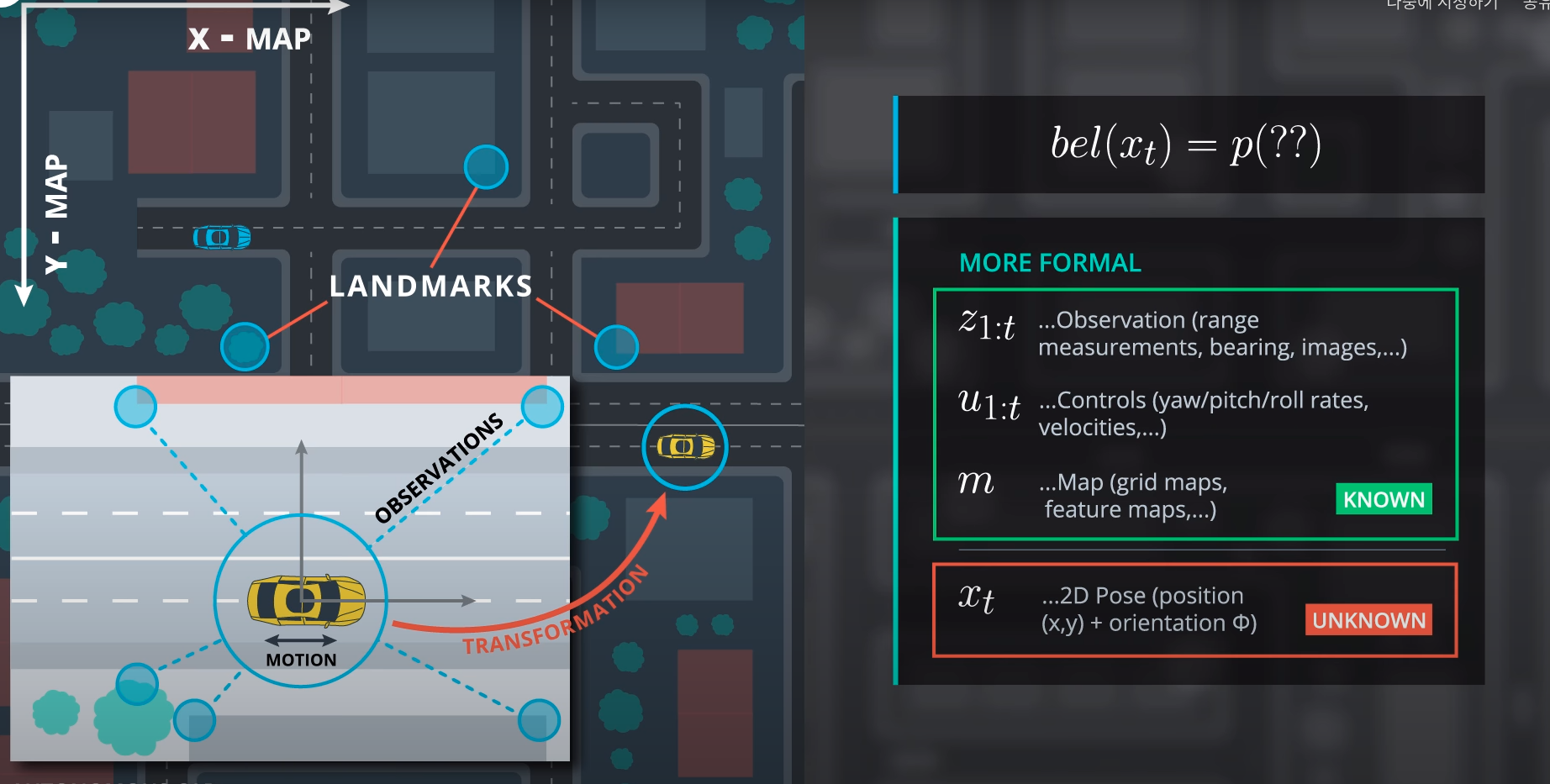
- Localization:
1. “Where is our car in a given map with an accuracy of 10cm or less?”
2. “Onboard Sensors are used to estimate transformation between measurements and a given map.”
2. 로봇 1차원 좌표 localization
-
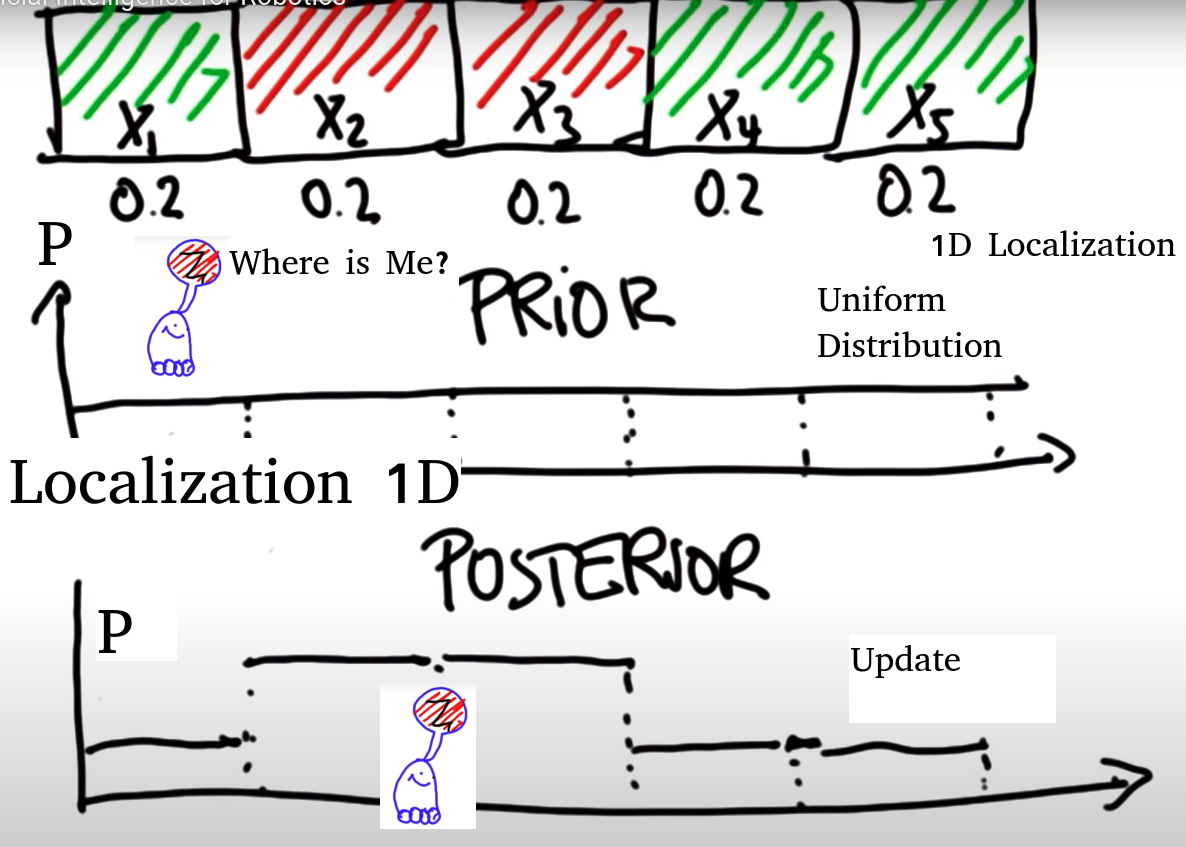
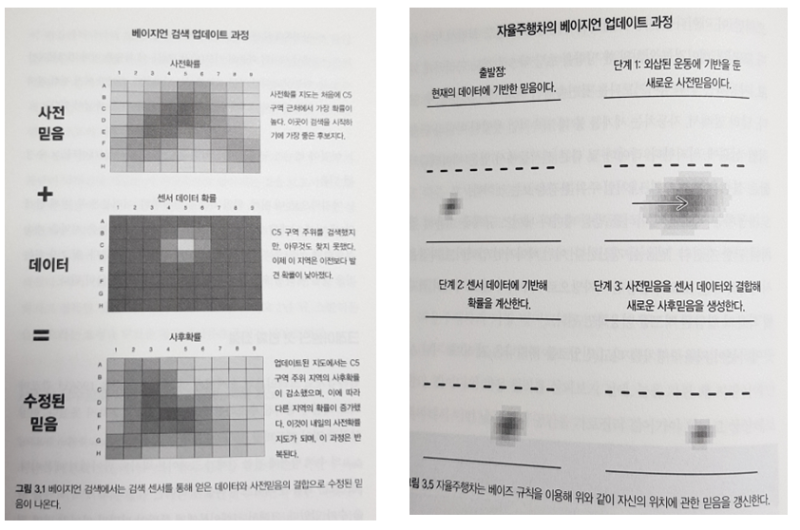
Bayes Rule에 기반한 로봇의 1차원 Localization 문제에서의 Update단계는 아래 그림과 같다.
-
Bayes Rule 수식으로 위의 상황을 설명해보자
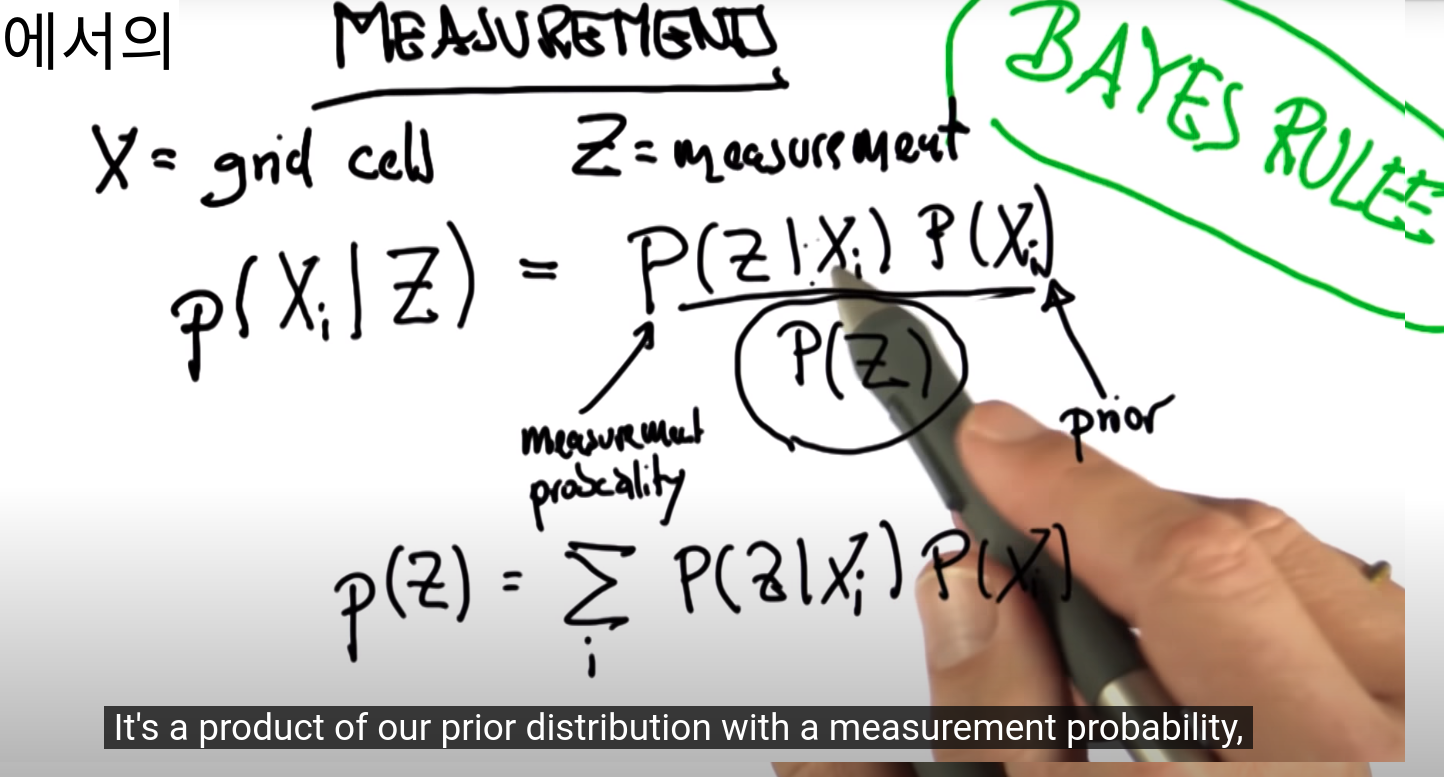 - Posterior는 $P(X_i|Z)$이고, Prior는 $P(X_i)$ = 0.2이다.
- Measurement가 빨간색이었다고 하면, 빨간색 cell에는 0.6을 곱하고 그렇지 않은 cell에는 0.2를 곱한다고 하자. 이게 $P(Z|X_i)$ 즉, 관측됬을 때 실제 그 위치에 있을 확률이 된다.
- Prior $P(X_i)$와 $P(Z|X_i)$를 곱하고 전체 확률 (P(Z))로 Normalization을 해준 값이 Bayes Rule 업데이트가 된다.
- Posterior는 $P(X_i|Z)$이고, Prior는 $P(X_i)$ = 0.2이다.
- Measurement가 빨간색이었다고 하면, 빨간색 cell에는 0.6을 곱하고 그렇지 않은 cell에는 0.2를 곱한다고 하자. 이게 $P(Z|X_i)$ 즉, 관측됬을 때 실제 그 위치에 있을 확률이 된다.
- Prior $P(X_i)$와 $P(Z|X_i)$를 곱하고 전체 확률 (P(Z))로 Normalization을 해준 값이 Bayes Rule 업데이트가 된다. -
좀 더 확장해서 표현 (추론 이론에 접목)
 P(X) 부분이 모델이라고 표현된 부분이 잇는데 이 부분은 추론이
P(X) 부분이 모델이라고 표현된 부분이 잇는데 이 부분은 추론이 predict와 update로 구성되니까 P(X)는predict단계에서 넘어온 것이고predict는 모델에 관한 함수여서 그런 것이다. -
책에서 쉽게 표현된 그림으로 설명하면 데이터가 관측값이 되고 이 값이 사전 믿음에 곱해지면 업데이트가 되는 지극히 상식적이고 쉬운 과정을 확률로서 표현한 것 뿐이다.
-
Model Process에서는 불확실성이 더해지는 형태가 되고, forward 연산이 수행된다.
-
In general, entropy represents the amount of uncertainty in a system.
-
용어:
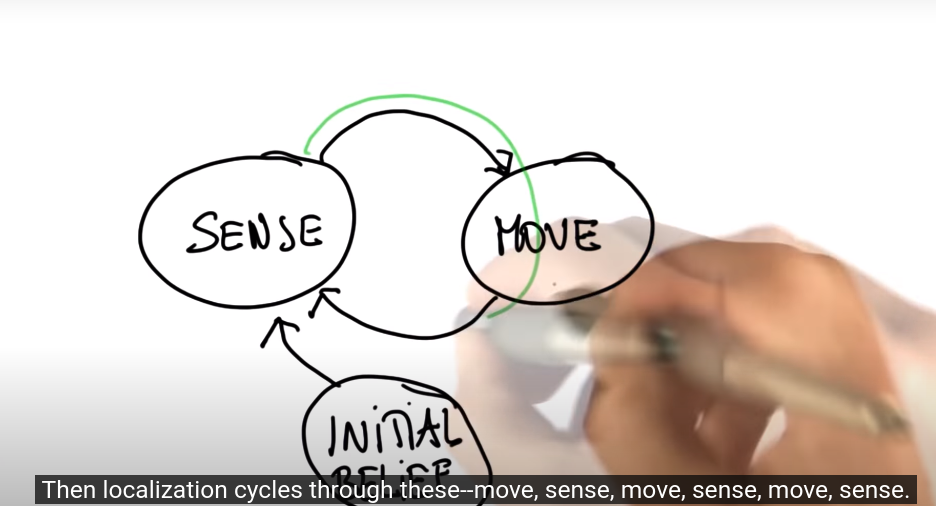
BELIEF= ProbabilitySense(update)= Measurement (Product, followed by Normalization)Move(predict)= Convolution(=Adding) - 왜 convolution이라 표현했냐면, 여러 파티클에 대해 각각 move가 적용되어 predict 되어야 하기 때문이다.
3. Summary Localization
 1. 주어진 맵에서 내 위치를 찾는 것 (
1. 주어진 맵에서 내 위치를 찾는 것 (Local Localization)
2. 주어진 맵과 Global Map간의 transformation 관계를 안다면, Global Localization 까지 가능
3. 위 그림에서 $bel(X_t) = P(X_t|z_{1:t}, u_{1:t}, m)$ 된다.
- 번외로, SLAM(Simultaneously Localization And Mapping)에서는 Map까지 작성을 해야하니,
$P(x_t, m|z_{1:t}, u_{1:t})$가 된다.
- 전체 프로세스 (
Bayes Filter)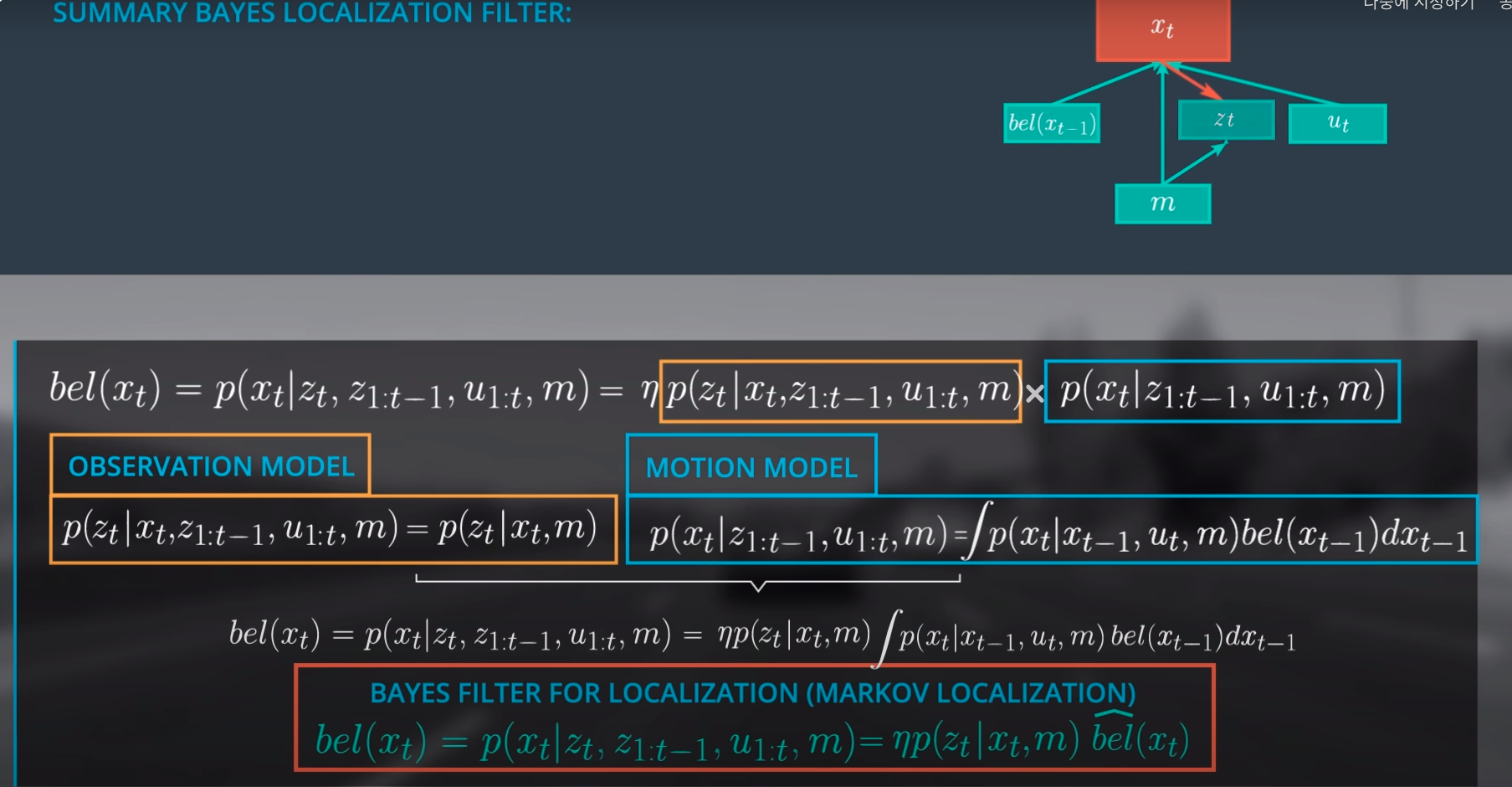
- 상태 추정 문제에서는 관심을 갖고 있는 State에 대한 값을 계속 업데이트 해 간 것이고
- 측위 문제는 모든 관측값에 대한 보정된 확률을 다 가져와서(곱해서), 여러 파티클 중 가장 매칭 확률이 높은 파티클을 현재 위치로 측위하게 되는 것이다.
-
강의 자료 참고
-
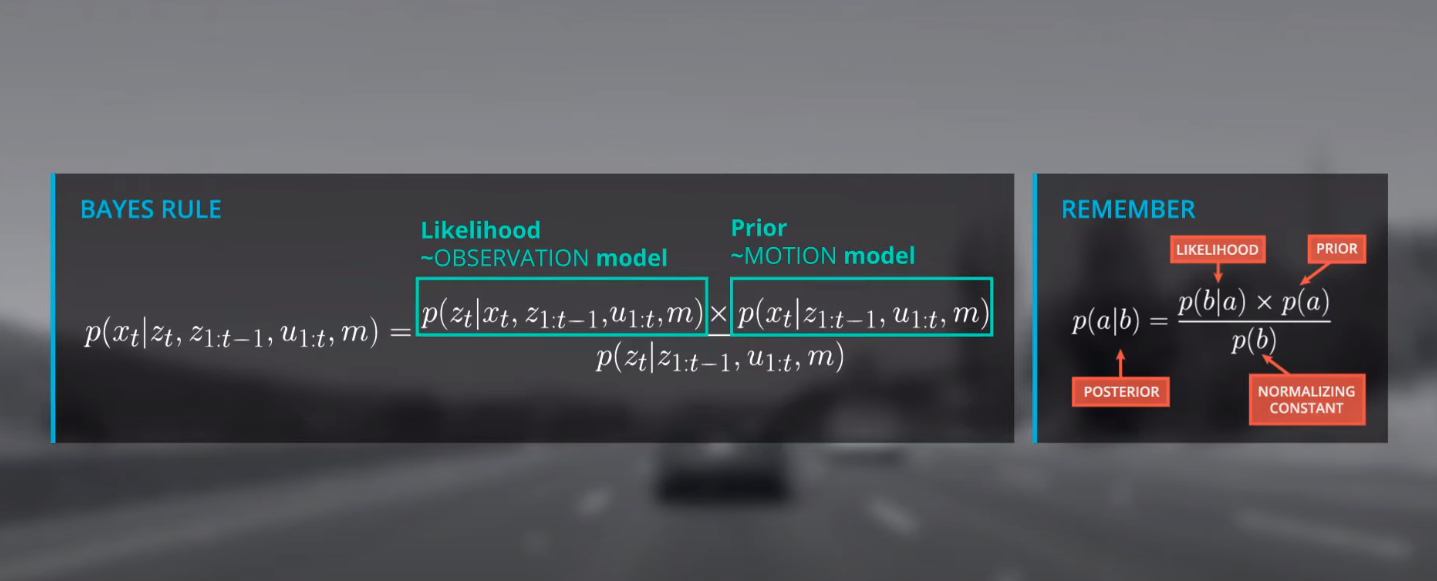
Bayes Filter for Localization(Markov Localization)
$bel(x_t) = p(x_t|z_t,z_{1:t-1}, u_{1:t}, m)=\eta * p(z_t|x_t,m)\hat{bel}(x_t)$ Markov Localization,Kalman Filters그리고Particle Filters는Bayes Filter의Realization표현형이다.
4. 1D Localization uisng Bayesian Rule Practice
- bayes 이론을 그대로 접목하여 로컬라이제이션 필터를 만들었다.
- 1D given map에서 푸는 문제였기 때문에 주어진 모든 경우의 수에 대하여 navie하게 전부를 계산하여 접근하였기 때문에
bayes그 자체를 사용할 수 있었다. - Code is Here: MyRepo
끝
